Tien Kung 3.0
$ 125 000![]()
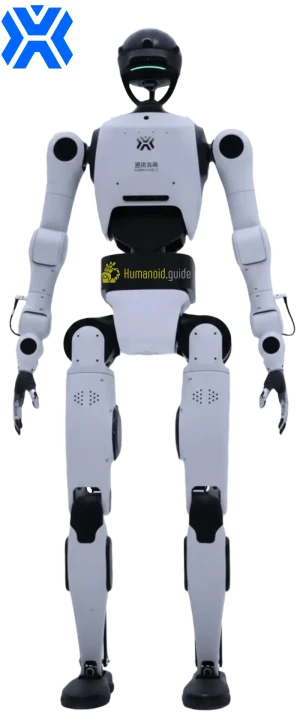
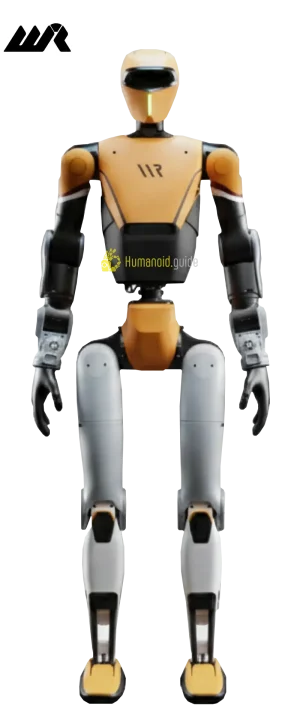
Tien Kung 3.0 is a full-size humanoid robot designed for dynamic mobility and open development. It runs, climbs stairs, jumps, and adapts to varied environments through an open hardware and SDK ecosystem.
Showing 305–320 of 351 results

![]()
Tien Kung 3.0 is a full-size humanoid robot designed for dynamic mobility and open development. It runs, climbs stairs, jumps, and adapts to varied environments through an open hardware and SDK ecosystem.
![]()
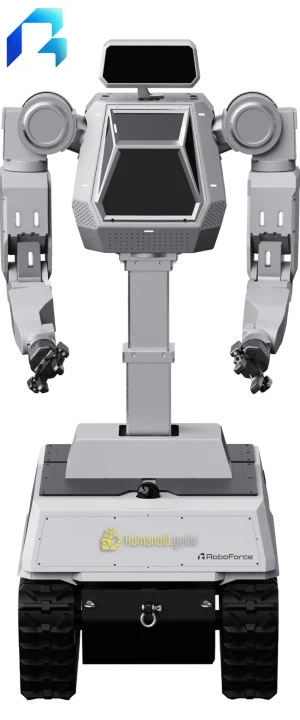
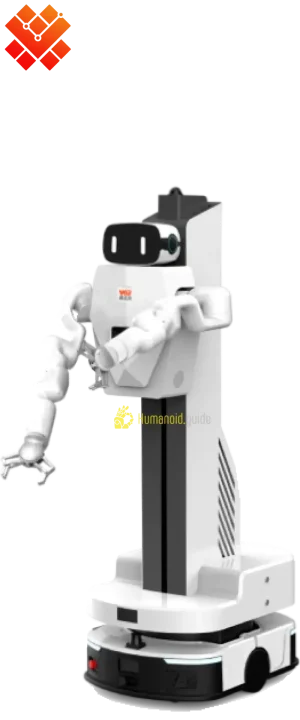
TM Xplore I is Techman Robot’s first wheeled humanoid prototype, combining AI vision, articulated arms, and a mobile base for flexible handling and industrial automation in warehouses and factories.
![]()
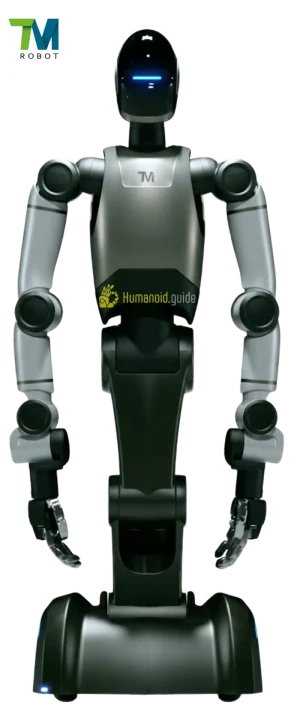
TORA DoubleOne is a wheeled humanoid robot developed by PaXini for real-world industrial and service environments. It combines articulated upper-body manipulation with a stable, high-speed mobile base, enabling efficient work in human-designed spaces. The platform focuses on adaptability, safety, and continuous operation rather than experimental locomotion.

![]()
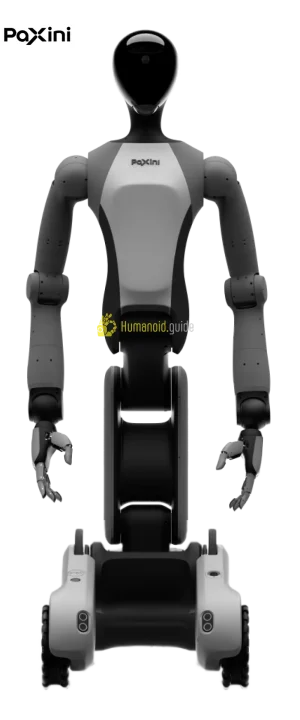
ToraOne is a groundbreaking humanoid robot from Paxini, offering advanced features, adaptability, and energy efficiency. It is designed to excel in diverse industries while promoting sustainability, setting a benchmark for how robots can seamlessly integrate into human environments.

![]()
The Torobo robot, developed by Tokyo Robotics, is a sophisticated humanoid designed for precise manipulation tasks and human interaction. It is built with advanced capabilities to support research, industrial automation, and other applications requiring high precision.

![]()
Titan O1 is a compact research-grade humanoid robot designed for mobility, manipulation, and embodied AI development. It combines strong lower-body actuation with flexible arm motion, making it suitable for labs, universities, and advanced robotics teams.

![]()
TWIST by Stanford University is a whole-body imitation system that enables real-time humanoid teleoperation and generates high-quality training data through natural human movement.

![]()
Telexistence TX System is a large-scale teleoperation platform that enables humanoid robots to perform real tasks while generating real-world training data.

![]()
Open-source VLA for general-purpose humanoid manipulation; built on Qwen2.5-VL and Isaac-GR00T
![]()
Open-source world model-action architecture for general-purpose robot learning; includes simulation engine and policy head

![]()
Universal simulator trained on diverse interaction data; generates realistic robot action consequences for policy learning


Unitree’s new R1 is a 1.22 m‑tall, 25 kg humanoid priced from US $5 900 that can run, cartwheel and recover falls, bringing full‑body robotics into an affordable developer‑friendly form factor.

![]()
Video Joint Embedding Predictive Architecture; predicts future video representations for robot action planning from passive video
![]()
VB1-I is a full-size humanoid robot developed by Lanxin Robotics for research, industrial exploration, and embodied AI development. It focuses on stable bipedal locomotion, whole-body coordination, and safe operation in structured environments.

![]()
VB2 is a humanoid robot developed by Lanxin Robotics for advanced research and industrial experimentation. It builds on earlier platforms with improved mobility, manipulation, and system integration. The robot targets real-world testing in controlled environments.
Select at least 2 products
to compare