GENE-26.5
$ 0![]()
GENE-26.5 is a general-purpose world model that predicts how environments change over time, enabling AI systems to reason, plan, and adapt across complex real-world scenarios.
Showing 17–32 of 43 results

![]()
GENE-26.5 is a general-purpose world model that predicts how environments change over time, enabling AI systems to reason, plan, and adapt across complex real-world scenarios.

![]()
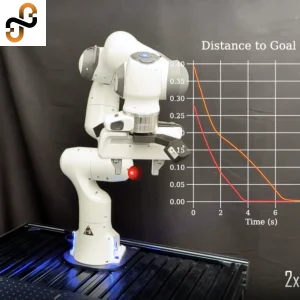
GO-2 is an embodied AI foundation model that combines action reasoning with stable real-world execution.
![]()
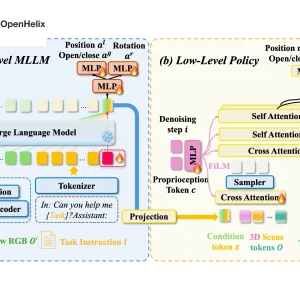
First VLA for full humanoid upper-body control at high frequency; dual-system architecture
![]()
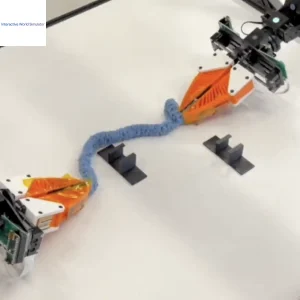
Action-conditioned world model generating 10+ min of interactive predictions at ~15 FPS on RTX 4090; supports teleoperation and policy evaluation

![]()
Imagination-based agent using a transformer world model for RL; strong sample efficiency in simulated environments


Multimodal VLA from the Molmo family adapted for robot action prediction; open weights with strong zero-shot generalisation
![]()
Neural Radiance Dynamics: combines NeRF with physics simulation for photorealistic robot manipulation world modelling

![]()
Physical AI world foundation model for generating photorealistic video simulations; supports robot and AV training


![]()
Open-source 7B VLA trained on Open X-Embodiment dataset; widely adopted open baseline for robot manipulation

![]()
Psi R1 is a Vision-Language-Action (VLA) model by PsiBot that enables robots to perform complex, long-horizon tasks through integrated perception, reasoning, and action.
![]()
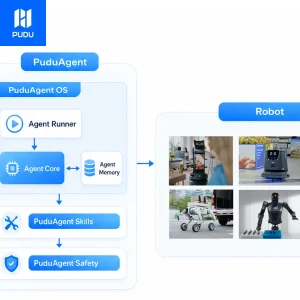
PuduAgent is Pudu Robotics’ general-purpose embodied agent platform, built on the PuduFM foundation model. It gives developers a unified software layer — system, capability, and safety — so many different robot forms can share one intelligence.

![]()
PuduFM 1.0 is Pudu Robotics’ embodied-intelligence foundation model built around physical intuition. It unites navigation and manipulation in one brain, learns from a massive real-world data flywheel, and powers many robot types under a “One Brain, Multiple Embodiments” approach.