Waseda traces 50 years of Waseda humanoid robots development
Waseda University on May 8 published a 50-year retrospective on Waseda humanoid robots, tracing a research line that began with WABOT-1 in 1973 and now extends to the care-oriented AIREC project. The feature, posted by the university in Tokyo, is less a product launch than a compact history of how one institution moved from early humanoid locomotion and manipulation to speech, musical performance, emotion expression, and assistive care.
The article matters because it ties several landmark platforms into a single development arc. Rather than treating each machine as an isolated demonstration, Waseda presents them as steps in a long-running effort to make humanoid systems more capable in human environments.
How Waseda humanoid robots set an early research agenda
According to Waseda University, WABOT-1, completed in 1973 under the late Professor Ichiro Kato, is widely considered the world’s first full-scale humanoid robot. The university says it could walk on two legs, grasp objects with its hands, and communicate in simple Japanese, with abilities researchers compared to those of a 1 1/2 year old child. Waseda credits that machine with helping jump-start modern humanoid robotics research.
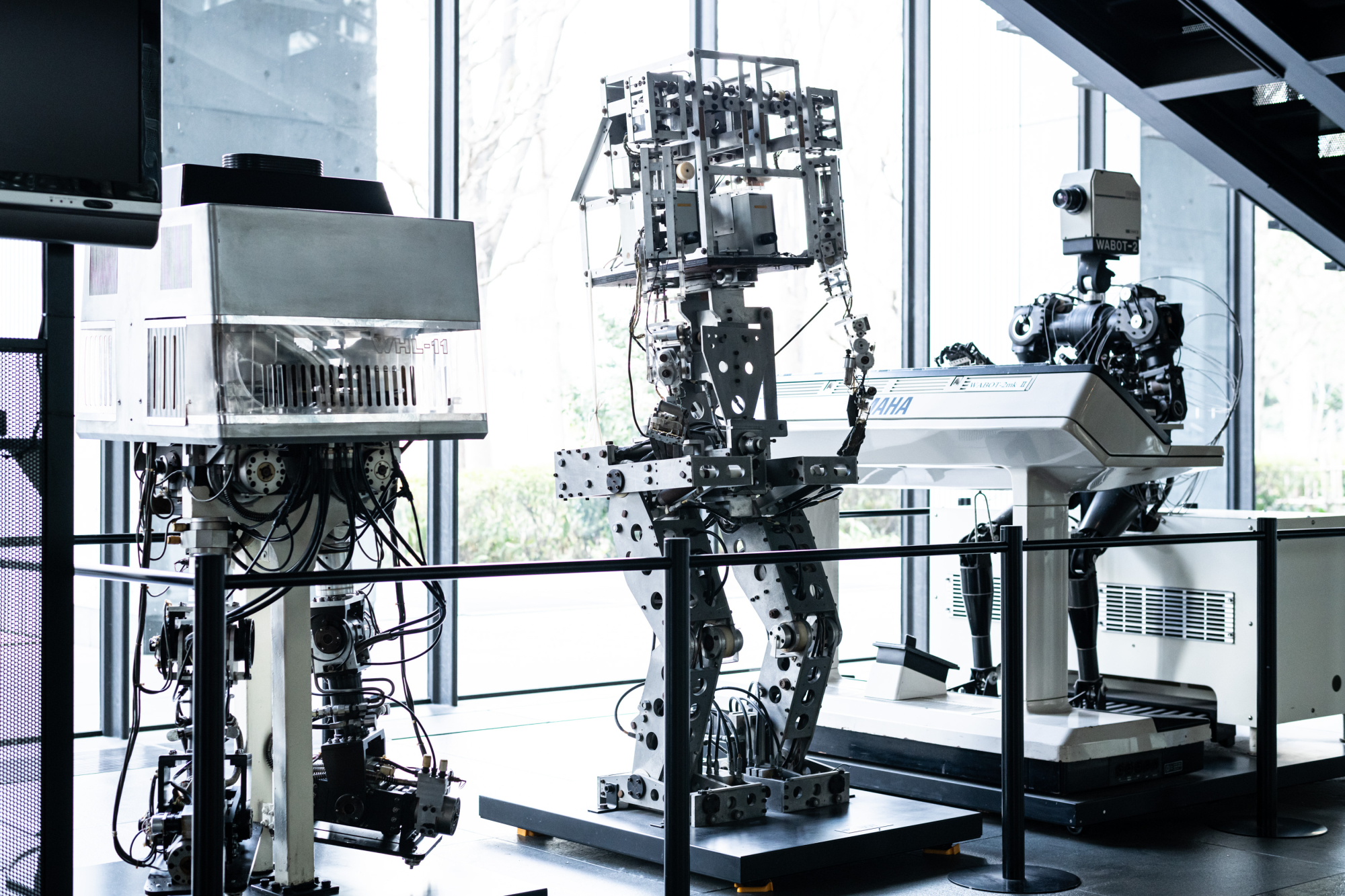
The second landmark in the retrospective is WABOT-2, introduced in 1984 as a humanoid robot built for musical performance. Waseda says it could read sheet music, play an electronic organ with both hands and feet, and adjust its playing to accompany a human singer. The university notes that WABOT-2 gained wider attention at Expo ’85 in Tsukuba, and that while it is usually displayed beside WABOT-1 in Building 63 on Waseda’s Science and Engineering Campus, it is currently on loan to the National Communication Museum in Melbourne and is expected back in mid-late 2026.
From locomotion to speech and musical performance
The retrospective then moves into research series that focused less on single headline demos and more on fundamental humanoid capabilities. The WABIAN line, developed in the 1990s and 2000s, studied smooth and natural bipedal walking, including turning and carrying objects while in motion. Led by researchers including Professor Atsuo Takanishi, the series was aimed at improving balance control and coordination, two core requirements for practical humanoid mobility.
Waseda also highlights the Waseda Talkers, or WT series, developed from around 2000 to 2008 to study how humans produce speech. Instead of relying on standard speakers, these anthropomorphic robots physically recreated parts of the human vocal system, including artificial vocal cords, lungs, and a mouth. In parallel, the WF-4R flutist robot examined the motor control and sensing involved in musical performance, while KOBIAN, introduced in 2009, shifted attention to facial expressions and body movement as a way to study emotional communication between humans and robots.
Care and assistance move to the center
The later systems in the article show a clear shift toward domestic and care settings. TWENDY-ONE, introduced in 2007 and developed under Professor Shigeki Sugano, was designed as a practical helper for everyday situations, especially for older adults and people needing care. Waseda says its soft, sensitive hands and advanced sensors were intended to let it handle delicate objects and interact gently with humans, marking a move away from laboratory-only platforms.
That trajectory continues with AIREC, short for AI-driven Robot for Embrace and Care, which is still under development. The project is led by Professor Sugano with support from Professor Tetsuya Ogata and others, and Waseda says its goals include household assistance, caregiving, and medical aid. The university also places AIREC within Japan’s Moonshot Research and Development Program, which aims to create robots that can autonomously learn complex tasks and integrate into society as lifelong companions.
What the retrospective signals for humanoid research
As Waseda University reports, the through line across these machines is not only humanlike form but an expanding definition of what humanoid performance should include. Early work concentrated on walking, grasping, and basic communication. Later projects added speech production, coordinated musical action, emotional expressiveness, and eventually the kind of physical assistance needed for care and household work.
For the humanoid robotics sector, the retrospective is a reminder that many of today’s priorities have deep roots in university labs rather than recent commercial cycles. WABOT-1 and WABOT-2 remain historical reference points, but the unresolved challenge lies with systems such as AIREC, where safety, task learning, and day-to-day usefulness must come together in one humanoid platform. That makes Waseda’s history relevant not only as a museum narrative, but as a guide to which technical problems still define the field.
Source: waseda.jp