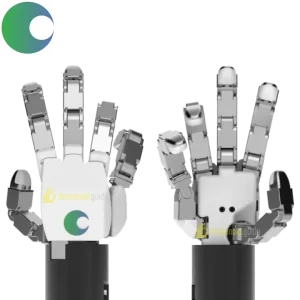
RH8D
$ 6 000
![]()
Seed Robotics
Cost-effective and highly reliable robotic hands engineered specifically to support the needs of the research community, offering a balance of affordability, durability, and consistent performance across a wide range of experimental and development applications.
Hand Score


Specifications and details:
| Strength [kg] | 2.5 |
|---|---|
| Weight [kg] | 0.8 |
| Size | 20cm |
| Number of fingers | 5 |
| Degrees of freedom, hands | 7 |
| Tactile/Force Sensors | Yes |
| Motor tech | Brushed Servo Actuators |
| Main structural material | Nylon |
| Manufacturer | Seed Robotics |
| Nationality | Portugal |
| Website | http://www.seedrobotics.com |
Description
The RH8D is a human-inspired robotic hand designed to bring natural manipulation into robotics. It mirrors the structure of a real hand, including an opposable thumb and flexible fingers, which allows it to perform a wide range of everyday grasps. As a result, it fits well into humanoid robots, research platforms, and collaborative systems where precision and adaptability matter. Moreover, its design focuses on balance, so it delivers both dexterity and strength without becoming bulky or complex.
2026 Humanoid Robot Market Report
Interested in the RH8D? Download 198 pages of exclusive insight from global robotics experts — uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
humanoid expert
In addition, the RH8D emphasizes usability and integration. It combines built-in sensing with responsive control, so developers can quickly connect it to existing robotic systems. Because it captures detailed movement and force data, it supports advanced tasks such as learning-based manipulation and human-robot interaction. Therefore, teams can use it not only for handling objects but also for experimenting with intelligent behaviors and real-world robotics applications.
https://www.seedrobotics.com/rh8d-adult-robot-hand
Download the Humanoid Robot Market Report here