Psi E1
$ 0
![]()
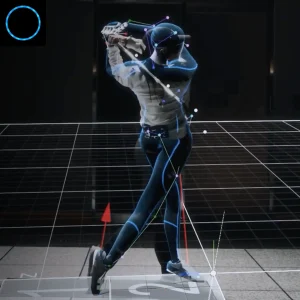
Psi E1 is an anthropomorphic exoskeleton by PsiBot that captures real-world human motion data to train and improve embodied AI models.
Available on backorder
Specifications and details:
| Type | Teleoperation Platforms |
|---|---|
| Availability | In production |
| Manufacturer | PsiBot |
| Nationality | China |
| Website | https://www.psibot.ai/ |
| Primary Purpose | Embodied AI data collection |
| Core Function | 1:1 human motion mapping |
| Control Method | Wearable teleoperation |
| Data Type | Real-world manipulation data |
| Key Feature | Joint-level motion mirroring |
| Interaction Mode | Human-in-the-loop |
| Use Cases | Robotics training, dexterous manipulation |
| Integration | Works with VLA / embodied models |
| System Role | Data acquisition layer |
| Focus Area | Dexterity and long-horizon skill learning |
Description
PsiBot Psi E1 acts as a human-in-the-loop data interface for embodied foundation models. It uses a homomorphic exoskeleton design that mirrors human motion in real time. As a result, operators can generate precise manipulation data through natural movement instead of scripted control. Moreover, the system captures subtle force and motion patterns, which improves the quality of training data for dexterous robotic tasks.
In addition, Psi E1 strengthens the data pipeline behind embodied AI models by enabling scalable real-world collection. It connects directly with PsiBot’s broader ecosystem, where simulation and real-world learning support each other. Therefore, developers can refine models faster and improve performance in complex environments. By focusing on realistic interaction, the system helps models learn long-horizon skills and adapt to new tasks with greater consistency.
New! 2026 Humanoid
Robot Market Report
198 pages of exclusive insight from global robotics experts — uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

now Google DeepMind
Contact Humanoid.guide
Website: https://www.psibot.ai/en/product_psibot-e1/