DayDreamer
$ 0
![]()
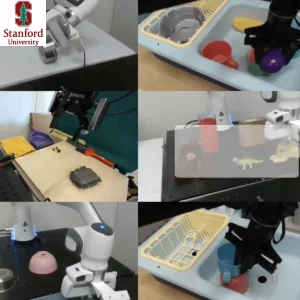
Model-based RL agent that learns directly from image observations on real robots with a world model; no sim-to-real needed
Available on backorder
Brain Score


Specifications and details:
| Nationality | US |
|---|---|
| Website | https://rail.eecs.berkeley.edu/ |
| Model type | Foundation Model |
| Manufacturer | UC Berkeley |
| Release date | 2023 |
Description
DayDreamer is a foundation model that trains robots directly in real-world environments by learning from visual input and experience. Instead of relying on simulation, it observes outcomes and improves through continuous interaction. Consequently, the model develops practical skills that reflect real conditions from the start. Moreover, this approach eliminates the gap between simulated and real environments, which often slows deployment.
In addition, DayDreamer uses a world model to imagine possible outcomes before acting. Therefore, it can evaluate strategies internally and select more effective behaviors. This predictive capability accelerates learning while reducing mistakes. Because it works from raw images, the system adapts to different setups without extensive tuning. As a result, DayDreamer supports more natural, efficient, and adaptive robotic behavior in real-world settings.
New! 2026 Humanoid
Robot Market Report
198 pages of exclusive insight from global robotics experts — uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

now Google DeepMind
Contact Humanoid.guide
Website: https://rail.eecs.berkeley.edu