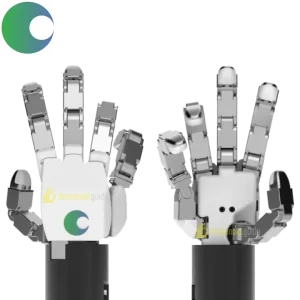
Allegro Hand V4
$ 24 500
![]()
Wonik Robotics
The Allegro Hand V4 is a lightweight, dexterous robotic hand designed for manipulation research and robotics development. It features multiple independently controlled joints and supports real-time control for advanced grasping applications.
Available on backorder
Hand Score


Specifications and details:
| Strength [kg] | 5 |
|---|---|
| Weight [kg] | ~1.1 – 1.2 kg |
| Size | Assumed human-hand scale: roughly 18–22 cm length |
| Number of fingers | 4 |
| Degrees of freedom, hands | 16 |
| Tactile/Force Sensors | No |
| Motor tech | DC motors with torque control |
| Main structural material | Lightweight industrial materials (assumed high-strength alloys and composites) |
| Manufacturer | Wonik Robotics |
| Nationality | South Korea |
| Website | https://www.allegrohand.com/ |
| Availability | In production |
Description
The Allegro Hand V4 brings flexible manipulation to robotic systems in both research and industry. It uses a human-inspired design with four fingers and many independent joints to support a wide range of object shapes. Engineers can integrate it with robot arms and test complex motion strategies with ease. Moreover, it works well on desktops and mounted rigs, letting developers focus on control and perception rather than hardware setup.
2026 Humanoid Robot Market Report
Interested in the Allegro Hand V4? Download 160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
Featuring insights from
Rob Knight
Open source,
humanoid expert
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
In addition, the hand supports real-time control and communication for responsive grasping. Developers find that the high control frequency and lightweight build improve experiment feedback. Because it works with diverse grasping algorithms out of the box, teams can prototype and refine manipulation skills quickly. Researchers choose it for studies in embodied AI, tactile feedback, and dexterous manipulation.
Download the Humanoid Robot Market Report here
Website: https://www.allegrohand.com/