LATENT Trains Humanoid Robot to Play Competitive Tennis System
Chinese researchers have introduced a new training framework called LATENT that enables a humanoid robot to play tennis using imperfect human motion data. The work positions sport as a demanding benchmark for real world robotic intelligence, where perception, balance, and dynamic motion control must operate continuously and under time pressure.
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

Featuring insights from
Aaron Saunders, Former CTO of
Boston Dynamics,
now Google DeepMind

2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
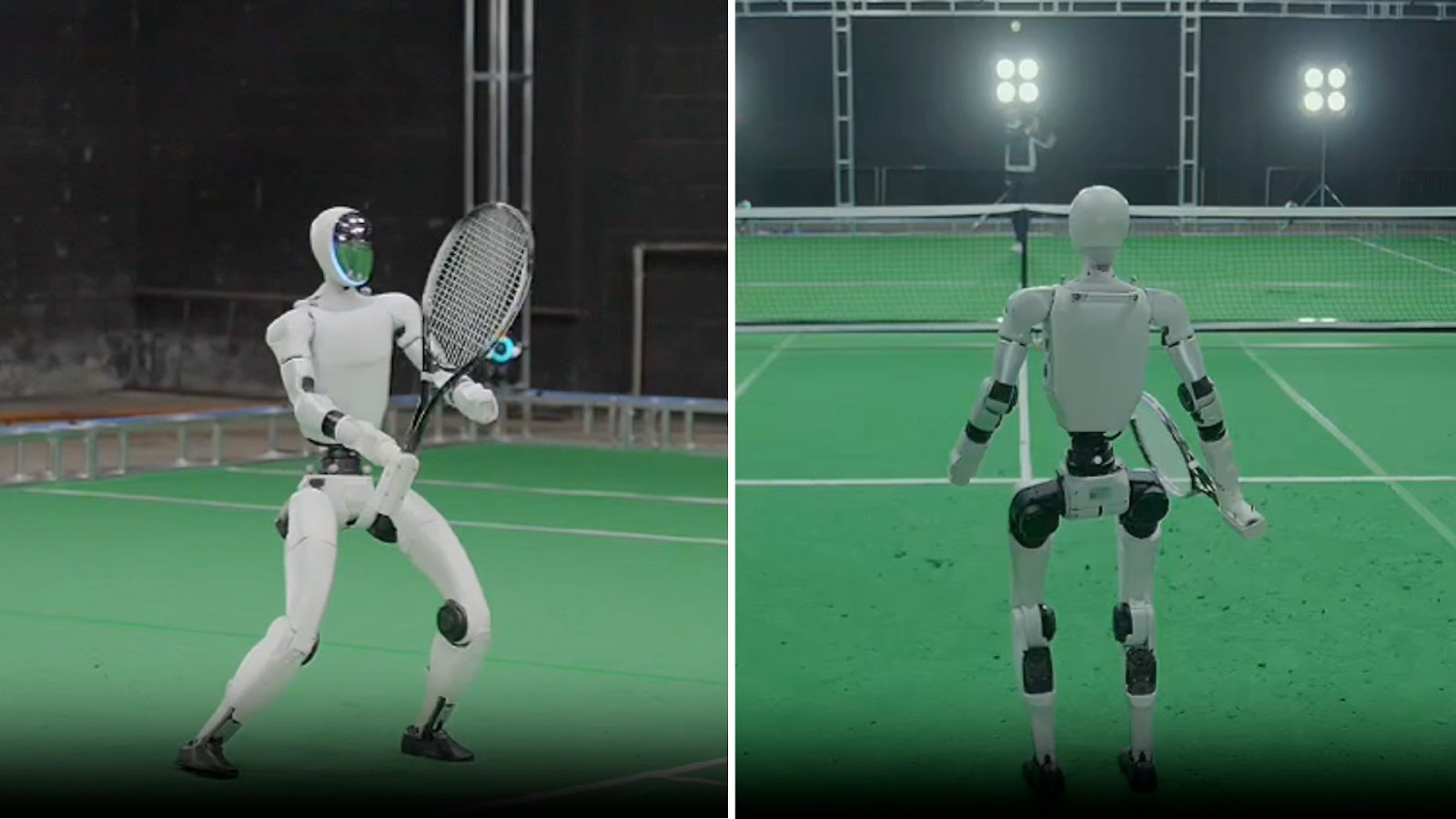
The system was validated on the Unitree G1 humanoid robot, which demonstrated forehand and backhand strokes while maintaining balance during rallies with human players. In testing, the robot achieved a reported peak success rate of 96.5 percent across 10,000 trials.
Learning from imperfect motion data
According to the research team, earlier attempts to replicate tennis skills in humanoid platforms were constrained by the difficulty of collecting clean, high fidelity human kinematic data. Tennis involves fast, nonlinear movements that are difficult to capture perfectly using motion tracking systems.
LATENT, short for Learns Athletic humanoid TEnnis skills from imperfect human motioN daTa, addresses this limitation by decomposing complex actions such as swings and footwork into smaller, learnable components. Rather than relying on flawless demonstrations, the framework extracts core movement priors from noisy or partially inaccurate datasets.
Reinforcement learning is then used to refine these priors into a control policy that allows the humanoid to react in real time. By correcting inconsistencies in the captured data and recombining movement elements, the system enables the robot to infer how a complete tennis stroke should be executed under varying conditions.
Tennis as a systems level benchmark
Tennis presents a particularly demanding integration challenge for humanoid robots. The machine must detect the ball, predict its trajectory, reposition its body, stabilize its lower limbs, and execute a coordinated swing within fractions of a second. Unlike staged industrial tasks, there is no pause between perception and action.
This continuous control loop makes tennis a useful proxy for broader real world applications where robots must operate in dynamic and partially unpredictable environments. The researchers note that entertainment and sports scenarios require nuanced motion and rapid adaptation, pushing beyond the structured settings typical of factories or warehouses.
Current limitations and next steps
Despite the reported performance metrics, the system remains limited when compared with professional human players. The current training setup uses randomly generated ball trajectories rather than a fully competitive match environment.
The research paper outlines several areas for improvement. Replacing motion capture inputs with active vision would increase autonomy and reduce reliance on external sensing infrastructure. The team also suggests a multi agent training framework in which two humanoids adapt to each other’s strategies, better simulating real match conditions.
While the immediate focus is tennis, the underlying framework is intended to generalize to other dynamic tasks. By demonstrating that humanoids can learn from imperfect human demonstrations and still achieve high performance in fast paced activities, LATENT contributes to ongoing efforts to close the gap between scripted robot behaviors and adaptive, real time control in complex environments.
Source: eweek.com