Kinetix AI unveils KAI humanoid robot with 115 degrees of freedom
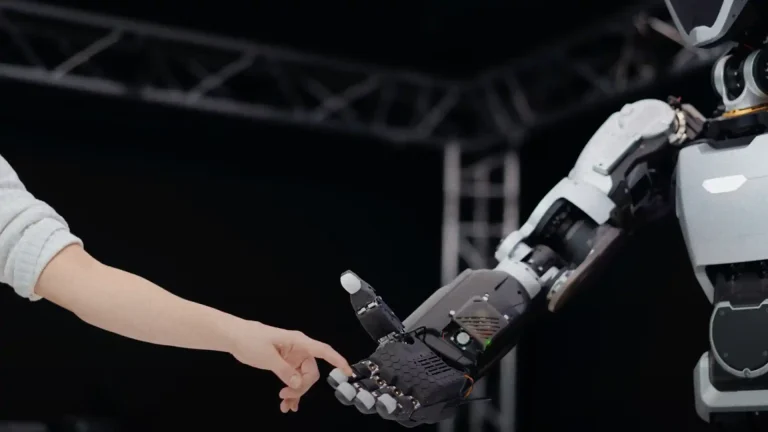
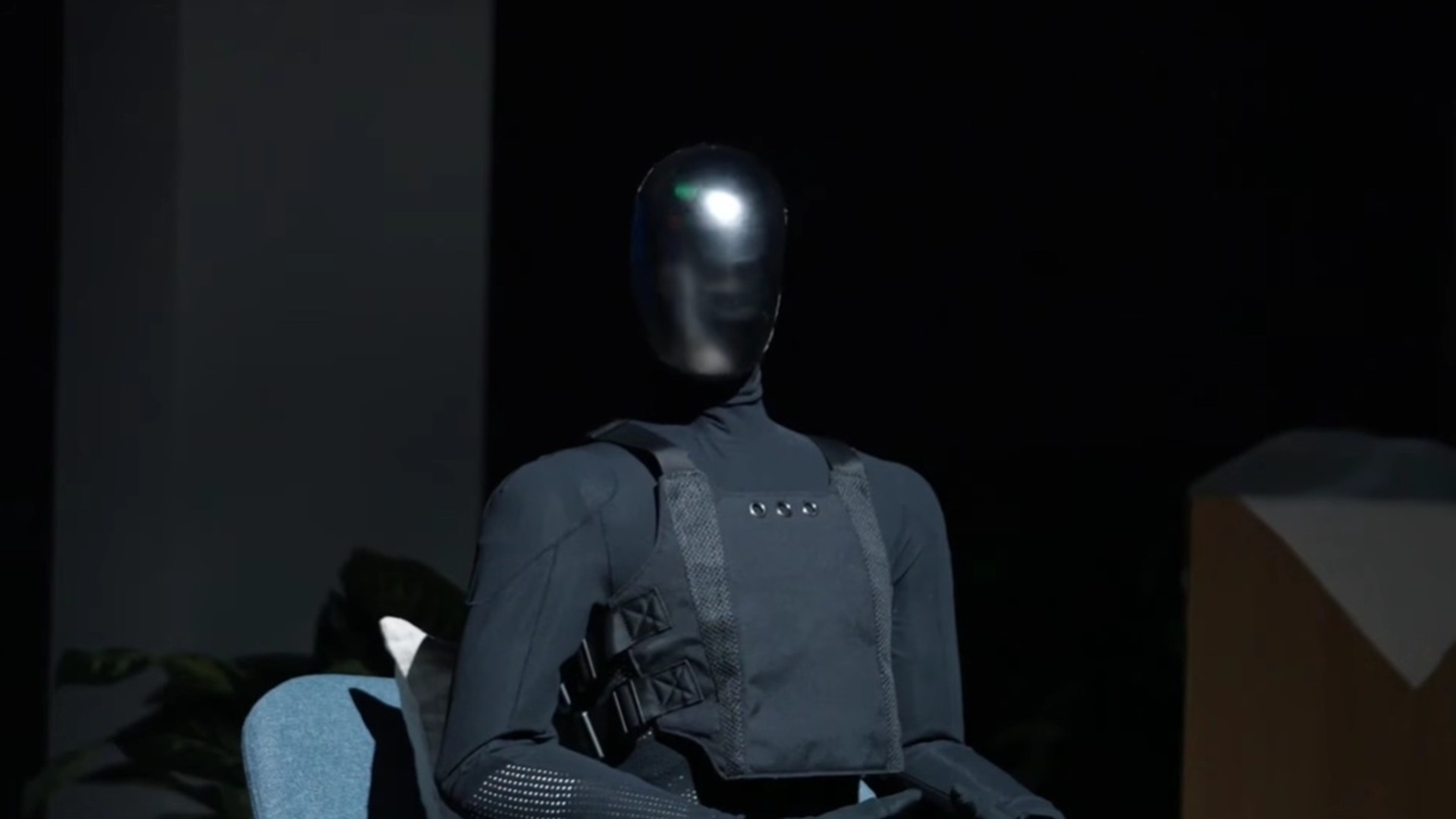
On May 3, Shenzhen-based Kinetix AI unveiled the KAI humanoid robot, a full-sized, faceless service platform with 115 degrees of freedom and synthetic tactile skin. The announcement is notable because it centers on two hard problems in humanoid robotics, dexterous hand manipulation and force-aware physical interaction, while aiming at retail, concierge and home-assistance tasks rather than heavy industrial work.
KAI humanoid robot specifications
According to Interesting Engineering, KAI stands 173 centimeters tall and weighs 70 kilograms. The robot is reported to reach a top speed of 5 kilometers per hour, carry loads up to 20 kilograms, and operate for four hours per charge. Kinetix AI also expects the system to cost less than $40,000, with mass production planned for later in 2026.
A large share of that complexity is concentrated in the upper body. KAI has 72 degrees of freedom in its hands alone, with 36 in each hand. The company says each hand combines 22 active joints for controlled motion and 14 passive joints that act as mechanical buffers, allowing the fingers to absorb impacts and adapt to objects without requiring immediate computational correction.
Touch sensing and service design
The KAI humanoid robot is also wrapped in synthetic tactile skin containing 18,000 sensing points. Those sensors can reportedly detect forces as light as 0.1 newtons, enabling the robot to adjust grip and contact behavior in real time. In practical terms, that could support safer handling of fragile objects and more controlled interaction in human environments.
Kinetix AI is positioning the machine for service settings rather than factory cells or logistics yards. As described in the source text, target use cases include retail support, concierge services and home assistance, with example tasks such as sorting goods, assembling products, loading and unloading a dishwasher, folding clothes and even threading a needle. That task list suggests the company is emphasizing fine motor control and close-range manipulation over raw throughput.
Training system and onboard architecture
KAI is powered by electric servo motors and built from aluminum alloy and composite materials. It uses a 1.7 kilowatt-hour semi-solid-state battery, which the company says is intended to reduce thermal runaway risk compared with conventional lithium-ion cells. The platform also supports Ethernet and Wi-Fi connectivity and includes integration with large language models, though the source does not detail the exact software stack or model providers.
On the autonomy side, Kinetix AI says the robot relies on a so-called World Model system with three decision layers, base, action and evaluation. As presented by the company, that architecture allows the robot to predict environmental changes and assess possible outcomes before executing movement, reflecting a simulation-first training approach. The description aligns with a broader effort in humanoid development to reduce trial-and-error learning on physical hardware.
To generate training data, the company developed a wearable device called KAI Halo. The system captures first-person video, body movement and spatial data from human operators performing everyday tasks, which Kinetix AI uses to build task demonstrations for the robot. That matters because service-oriented humanoids depend less on simple locomotion benchmarks and more on varied manipulation data gathered in realistic, cluttered environments.
The next step for Kinetix AI is to show that the hardware specifications translate into repeatable performance outside controlled demonstrations. For operators and buyers, the open questions are durability, manipulation speed, safety validation and whether the promised price can hold once the robot moves from prototype to mass production.
Source: interestingengineering.com