UniSim
$ 0
![]()
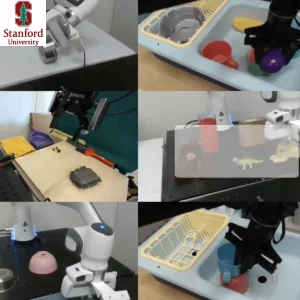
Universal simulator trained on diverse interaction data; generates realistic robot action consequences for policy learning
Available on backorder
Brain Score


Specifications and details:
| Nationality | US |
|---|---|
| Website | https://universal-simulator.github.io/unisim/ |
| Model type | Foundation Model |
| Manufacturer | Stanford / UC Berkeley |
| Release date | 2023 |
Description
UniSim is a foundation model that provides a shared training environment for robots to learn from diverse interactions. Instead of relying on a single dataset or environment, it integrates multiple experiences into one unified system. Consequently, the model develops a broad understanding of object behavior and environmental dynamics. Moreover, this diversity helps it handle unfamiliar tasks with greater confidence and adaptability.
In addition, UniSim predicts the consequences of actions before executing them. Therefore, it can select more effective strategies and avoid mistakes during task execution. This forward-looking capability improves both precision and efficiency in real-world applications. Because the system reflects realistic physics and interactions, learned skills transfer effectively to actual robots. As a result, accelerates progress toward general-purpose robotic control.
New! 2026 Humanoid
Robot Market Report
198 pages of exclusive insight from global robotics experts — uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

now Google DeepMind
Contact Humanoid.guide
Website: https://universal-simulator.github.io/unisim/