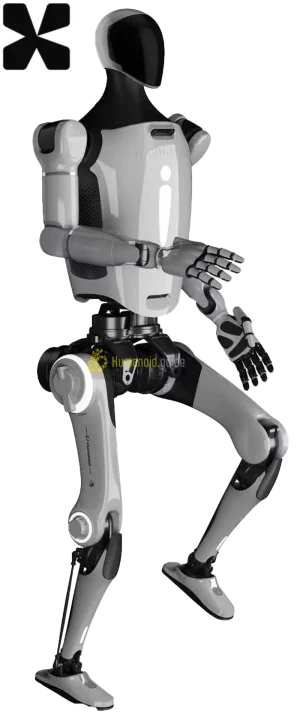
Walker S2
$ 80 000
![]()
UBTECH Robotics
Industrial humanoid with a 52‑DOF body, dexterous hands and an autonomous battery‑swap system, enabling near‑24/7 factory uptime while handling up to 15 kg within a human‑scale workspace.
Skill Score


Specifications and details:
| Availability | Prototype |
|---|---|
| Nationality | China |
| Website | https://www.commercial.ubtrobot.com/ |
| Degrees of freedom, overall | 52 |
| Degrees of freedom, hands | 22 |
| Height [cm] | 176 |
| Manipulation performance | 2 |
| Navigation performance | 2 |
| Max speed (km/h) | 7.2 |
| Strength [kg] | 15 |
| Weight [kg] | 43, 73 |
| Runtime pr charge (hours) | 2 |
| Safe with humans | Not specified |
| CPU/GPU | Not specified |
| Ingress protection | Not specified |
| Camera resolution | Dual RGB stereo |
| Connectivity | Bluetooth, WiFi |
| Operating system | Not specified |
| LLM integration | Not specified |
| Latency glass to action | Not specified |
| Motor tech | Not specified |
| Gear tech | Not specified |
| Main structural material | Not specified |
| Number of fingers | 10 |
| Main market | Industries, Lgistics. |
| Verified | Not verified |
| Walking Speed [km/h] | 7.2 |
| Shipping Size | Not specified |
| Color | Not specified |
| Manufacturer | UBTECH Robotics |
Description
Walker S2 is UBTECH’s full‑size industrial humanoid designed for factory work rather than demos. It combines high‑stability bipedal locomotion with a software stack aimed at autonomous task planning and recovery. The headline capability is a self‑battery‑swap system that removes most energy downtime, allowing near‑continuous operation in shift‑based environments.
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

Featuring insights from
Aaron Saunders, Former CTO of
Boston Dynamics,
now Google DeepMind
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
Mechanically, the platform targets human‑scale reach and strength. A 52‑DOF body, high‑torque waist, and fourth‑generation dexterous hands enable manipulation across a roughly two‑meter workspace with up to 15 kilograms of load. The hands are described as sub‑millimeter‑precision and durability‑tested, reflecting the move from lab prototypes toward ruggedized industrial hardware.
On the perception and autonomy side, Walker S2 uses dual‑RGB stereo vision in the head for human‑like depth perception, then fuses this with UBTECH’s BrainNet 2.0 and Co‑Agent stack for multimodal reasoning, skill execution, and exception handling. In demos, the robot performs natural bipedal walking, dynamic balancing, object handling, and the coordinated actions required to remove, dock, and reinstall battery modules without human assistance.
I’m Olivia, Humanoid Analyst at Humanoid.Guide
My mission, together with the team, is to help your organization understand the landscape, compare solutions, and move toward successful robot deployments.
Practically, the system is aimed at automotive and general manufacturing where uptime, repeatability, and safe human–robot coexistence are critical. While some specifications remain undisclosed and press reports differ on size and mass, the direction is clear: Walker S2 pushes humanoids toward round‑the‑clock, production‑floor utility, with manipulation and autonomy designed for real factories rather than just stages.