
RUKA
$ 1 500
![]()
New York University (NYU)
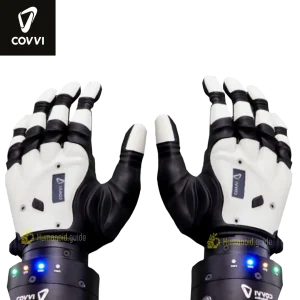
RUKA — an open‑source, tendon‑driven humanoid hand with 5 fingers and 15 DoF, sized like a human hand. It stays affordable and accessible, yet enables realistic grasps and dexterous manipulation using learned control with no built‑in joint sensors.
Available on backorder
Hand Score


Specifications and details:
| Strength [kg] | 6 |
|---|---|
| Weight [kg] | 0.48 |
| Size | Roughly human-hand size — about 18 cm length |
| Number of fingers | 5 per hand |
| Degrees of freedom, hands | 15 |
| Tactile/Force Sensors | No |
| Motor tech | Tendon‑driven using off‑the‑shelf servos (e.g. Dynamixel series in original, or lower‑cost alternatives), actuators placed in the forearm, flexible tendons routed to fingers. |
| Main structural material | 3D‑printed parts (PLA / similar plastic) for rigid “bones” plus compliant pads (e.g. TPU) for fingertips/contact surfaces. Tendons are braided line, and joints use standard mechanical pivots/dowels |
| Manufacturer | New York University (NYU) |
| Nationality | US |
| Website | https://ruka-hand.github.io/ |
| Availability | In production |
Description
The RUKA hand offers a surprisingly capable robotic manipulator at a modest cost. It uses a tendon‑driven mechanism, with motors housed in the forearm and flexible tendons running to the fingers. This lets the hand remain compact and human-sized while still offering diverse, human‑like grasps. Because RUKA uses 3D‑printed parts and common off‑the‑shelf components, anyone with basic tools can assemble it and begin experimenting.
2026 Humanoid Robot Market Report
Interested in the RUKA? Download 160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

Featuring insights from
Rob Knight
Open source,
humanoid expert

2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
Moreover, RUKA relies on learned control rather than elaborate joint sensors. Developers map fingertip and joint positions to motor commands using data from a motion‑capture glove. In practice, this design has proven surprisingly robust: tests show RUKA can perform power grasps, fine manipulations, and work for extended periods without overheating. This combination of affordability, dexterity, and human‑like form makes RUKA especially attractive for research labs, educational settings, or hobbyist robotics projects.
Download the Humanoid Robot Market Report here
Website: https://ruka-hand.github.io/