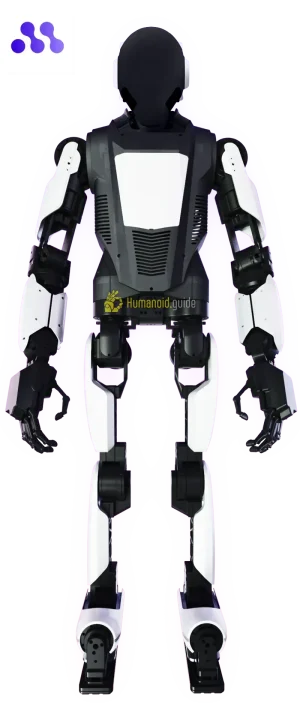
Phantom MK1
$ 100 000
![]()
Foundation
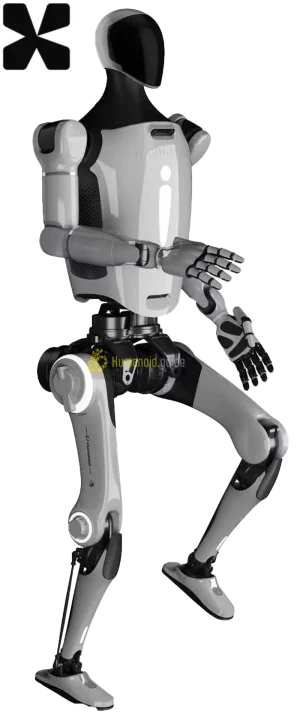
Phantom MK1 is a camera‑first humanoid from Foundation built to work in human spaces. Standing 175 cm and ~80 kg, it targets industrial and defense use cases with up to 20 kg payload, 1.7 m/s top speed, cycloidal actuators, and an LLM‑driven task‑to‑motion stack.
Skill Score


Specifications and details:
| Availability | Prototype |
|---|---|
| Nationality | US |
| Website | http://www.foundation.bot |
| Degrees of freedom, overall | 19, Upper body |
| Degrees of freedom, hands | Not specified |
| Height [cm] | 175 |
| Manipulation performance | 2 |
| Navigation performance | 2 |
| Max speed (km/h) | 6.1 |
| Strength [kg] | 20 |
| Weight [kg] | 80 |
| Runtime pr charge (hours) | Not specified |
| Safe with humans | backdrivable cycloid‑aktuatorer |
| CPU/GPU | Not specified |
| Ingress protection | Not specified |
| Camera resolution | Not specified |
| Connectivity | Not specified |
| Operating system | Not specified |
| LLM integration | Yes |
| Latency glass to action | Not specified |
| Motor tech | cycloidal actuators |
| Gear tech | Cycloidal |
| Main structural material | Not specified |
| Number of fingers | 10 |
| Main market | defence, Industries |
| Verified | Not verified |
| Walking Speed [km/h] | 6 |
| Shipping Size | Not specified |
| Color | Not specified |
| Manufacturer | Foundation |
Description
Phantom MK1 is a general‑purpose humanoid robot designed to perform real work in environments built for people. The project focuses on embodied AI that can adapt, learn and operate safely next to human coworkers. The platform is human‑sized to reach tools, doors and controls without changing facilities.
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

Featuring insights from
Aaron Saunders, Former CTO of
Boston Dynamics,
now Google DeepMind
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
The hardware centers on efficiency and safety. MK1 is about 175 cm tall and roughly 80 kg, with a reported payload around 20 kg and a top speed near 1.7 m/s. Cycloidal, back‑drivable actuators are used to deliver high torque while remaining compliant, which helps with both energy use and human‑safe interaction. Hands are anthropomorphic; detailed finger degrees of freedom and full IP ratings are not yet publicly specified.
Perception and control follow a camera‑first approach. High‑level intent is handled by large‑language‑model reasoning, while proprietary action models translate tasks into whole‑body motion. The stack blends autonomy with supervised teleoperation where needed, enabling skills like grasping, carrying, opening, and line tending. The aim is to compress the time from demonstration to reliable, repeatable behaviors on the factory floor.
I’m Olivia, Humanoid Analyst at Humanoid.Guide
My mission, together with the team, is to help your organization understand the landscape, compare solutions, and move toward successful robot deployments.
Phantom positions MK1 for industrial automation, logistics, and other rugged workflows, with additional interest in dual‑use and defense logistics. Early pilots emphasize throughput, cycle‑time reliability, and safety rather than demo theatrics. Several specifications remain to be announced and may evolve as deployments mature, but the direction is clear: a practical, human‑scale robot engineered for real production work.