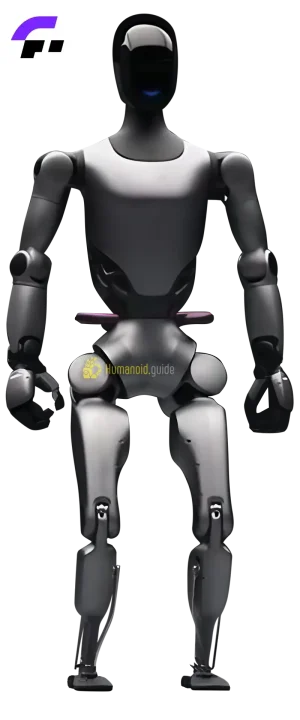
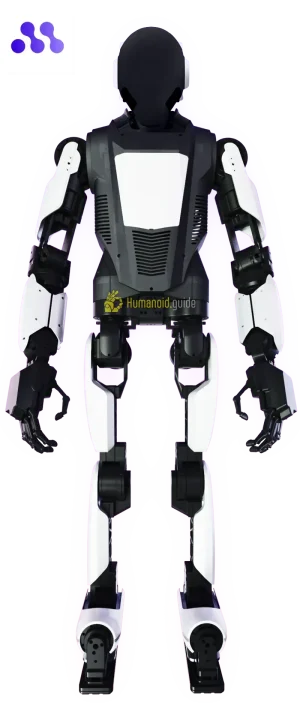
AgiBot X1
$ 20 000
![]()
AgiBot
The AgiBot X1 humanoid robot is a 130 cm, 33 kg open-source platform with 34 DOF, 0.5 kg arm payload and PowerFlow servo tech; it walks at 3.6 km h-¹, runs two hours per battery and costs under US $20 000—making advanced bipedal robotics attainable for research and maker communities.
Skill Score


Specifications and details:
| Availability | Prototype |
|---|---|
| Nationality | China |
| Website | https://www.agibot.com |
| Degrees of freedom, overall | 34 |
| Degrees of freedom, hands | Not specified |
| Height [cm] | 130 |
| Manipulation performance | 2 |
| Navigation performance | 2 |
| Max speed (km/h) | 3.6 |
| Strength [kg] | 0.5 |
| Weight [kg] | 33 |
| Runtime pr charge (hours) | 2 |
| Safe with humans | Yes |
| CPU/GPU | Open architecture – user supplies host PC/Jetson; onboard DCU real-time controllers (1 kHz, 100 Mbps) |
| Ingress protection | Not specified |
| Camera resolution | Optional RGB-D camera |
| Connectivity | Ethernet, FDCAN/CAN-FD, GPIO, OTA firmware, UART |
| Operating system | Linux |
| LLM integration | DIY: hooks for external LLMs via ROS2/AimRT; no bundled model |
| Latency glass to action | Not specified |
| Motor tech | PowerFlow quasi-direct-drive servo modules (R86/R52/L28 series) |
| Gear tech | Integrated low-ratio (<10 : 1) planetary reducers inside servos |
| Main structural material | Aluminium, composite shell over alloy frame |
| Number of fingers | 4 |
| Main market | Research & education labs, maker spaces, developer communities |
| Verified | Not verified |
| Walking Speed [km/h] | N/A |
| Shipping Size | N/A |
| Color | N/A |
| Manufacturer | AgiBot |
Description
The AgiBot X1 humanoid robot compresses a full-featured biped into a lab-friendly package: it stands 130 cm tall, weighs just 33 kg and rolls along at 1 m s-¹, so it fits through standard doorways yet still meets users at chest height. A minimalist composite shell hides a CNC-machined aluminium spine and neatly routed cables, giving the platform a professional finish that’s easy to service on a benchtop.
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.

Featuring insights from
Aaron Saunders, Former CTO of
Boston Dynamics,
now Google DeepMind
2026 Humanoid Robot Market Report
160 pages of exclusive insight from global robotics experts – uncover funding trends, technology challenges, leading manufacturers, supply chain shifts, and surveys and forecasts on future humanoid applications.
Thirty-four quasi-direct-drive joints—built around the company’s PowerFlow servos—power smooth walking, dynamic balance and upper-body gestures. The flagship R86-3 actuator delivers up to 200 N·m peak torque, while each adaptive OmniPicker gripper can lift 0.5 kg, enough for common manipulation tasks in research labs and maker spaces.
Hardware, CAD, control firmware and the Linux-based AimRT middleware are all open source; a distributed EtherCAT-to-FDCAN bus links real-time DCU boards running at 1 kHz, while high-level logic can live on any x86 or Jetson host, making ROS 2, reinforcement-learning pipelines or external LLMs straightforward to integrate. The documentation portal even lists all 29 body joints, three optional head axes and twin grippers, so developers can tweak every degree of freedom from day one.
I’m Olivia, Humanoid Analyst at Humanoid.Guide
My mission, together with the team, is to help your organization understand the landscape, compare solutions, and move toward successful robot deployments.
A swappable battery supports about two hours of untethered experimentation, and the entry-level kit lists at roughly R 387 000—around US $20 000—placing the AgiBot X1 within reach of universities, startups and hobbyist collectives craving an affordable, fully hackable humanoid platform that can keep pace with rapid advances in embodied AI.